Boqilang (Shanghai) Technology Development Co., Ltd
Address: 300 Songying Road, Qingpu District, Shanghai
Mr. Liu: 13818020450
Mr. Zhao: 13681948693
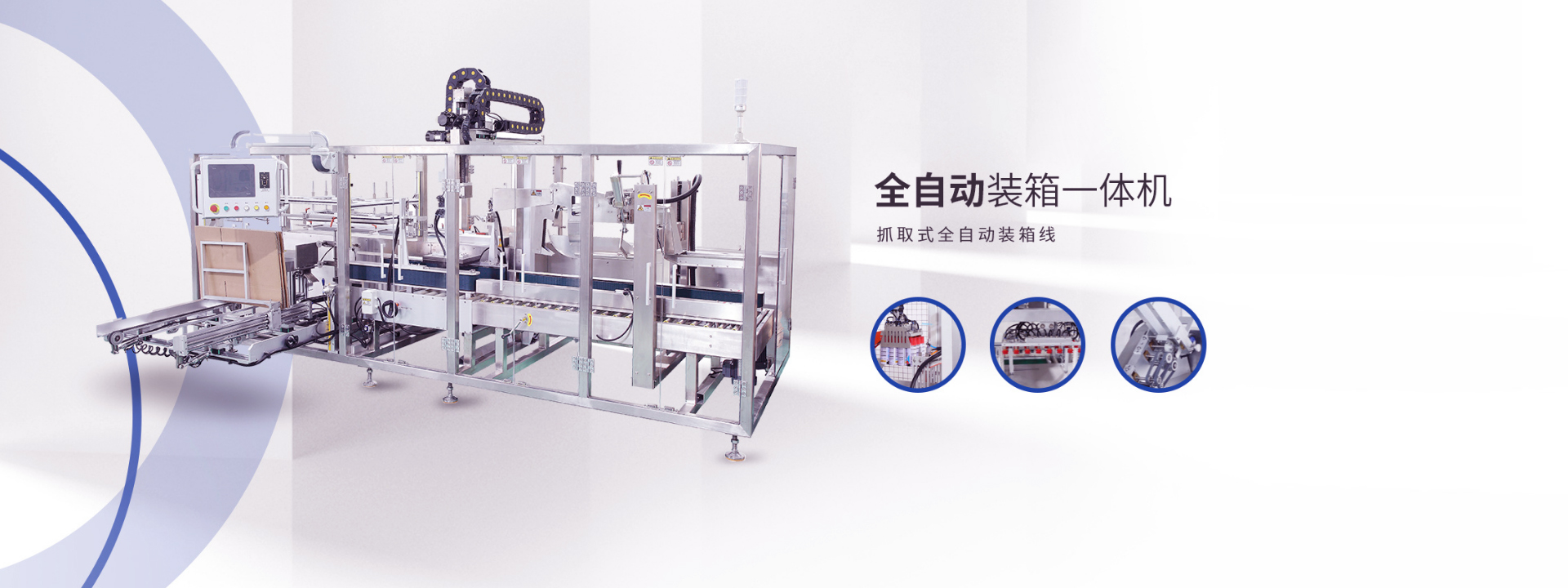
The parallel spider hand boxing machine adopts a fully independently developed visual recognition and positioning system to effectively identify the position of products and ensure the accuracy of product recognition.
The machine vision recognition system performs various highly precise tasks on high-speed production lines, and then transmits the processing results to parallel robots. The parallel robots make action processing plans through programming analysis and accurately complete the grasping and sorting actions. The parallel robot is equipped with a motor conveyor belt for the supporting conveyor line. Through the robot vision system positioning and feedback position from the conveyor line encoder, the robot can achieve position and posture recognition and accurate grasping of the target workpiece. According to the rhythm and on-site requirements, multiple conveyor lines can be operated simultaneously in parallel.
Carton size range: L250-450mm*W160-400mm*H100-350mm
Packing speed: 120 times/minute
Payload: 3KG
Device dimensions: Depending on product characteristics
power supply: 220V380V 50-60hz
Equipment power: 4KW
Gas source requirements : 0.6-0.8Mpa
Whole machine gas consumption: 450NL/min
Packing method and fixture types: ordinary suction cup type, vacuum sponge, customized furniture
二:Main equipment configuration
PLC Siemens Germany
touch screen Siemens Germany
robot body Domestic (Astro Boy)/Imported (ABB/Fanuc) Domestic/Imported
low-voltage electrical apparatus Schneider Germany
circuit breaker Schneider Germany
contactor Schneider Germany
Photoelectric detection switch Slck Germany
gear motor Tai Bang Taiwanese
pneumatic components Airtac Taiwan
vacuum generator SMC Japan
bearing NSK Japan